robot end effector interface
The basic steps for using any end effector with a robot are. The basic steps for using any end effector with a robot are.
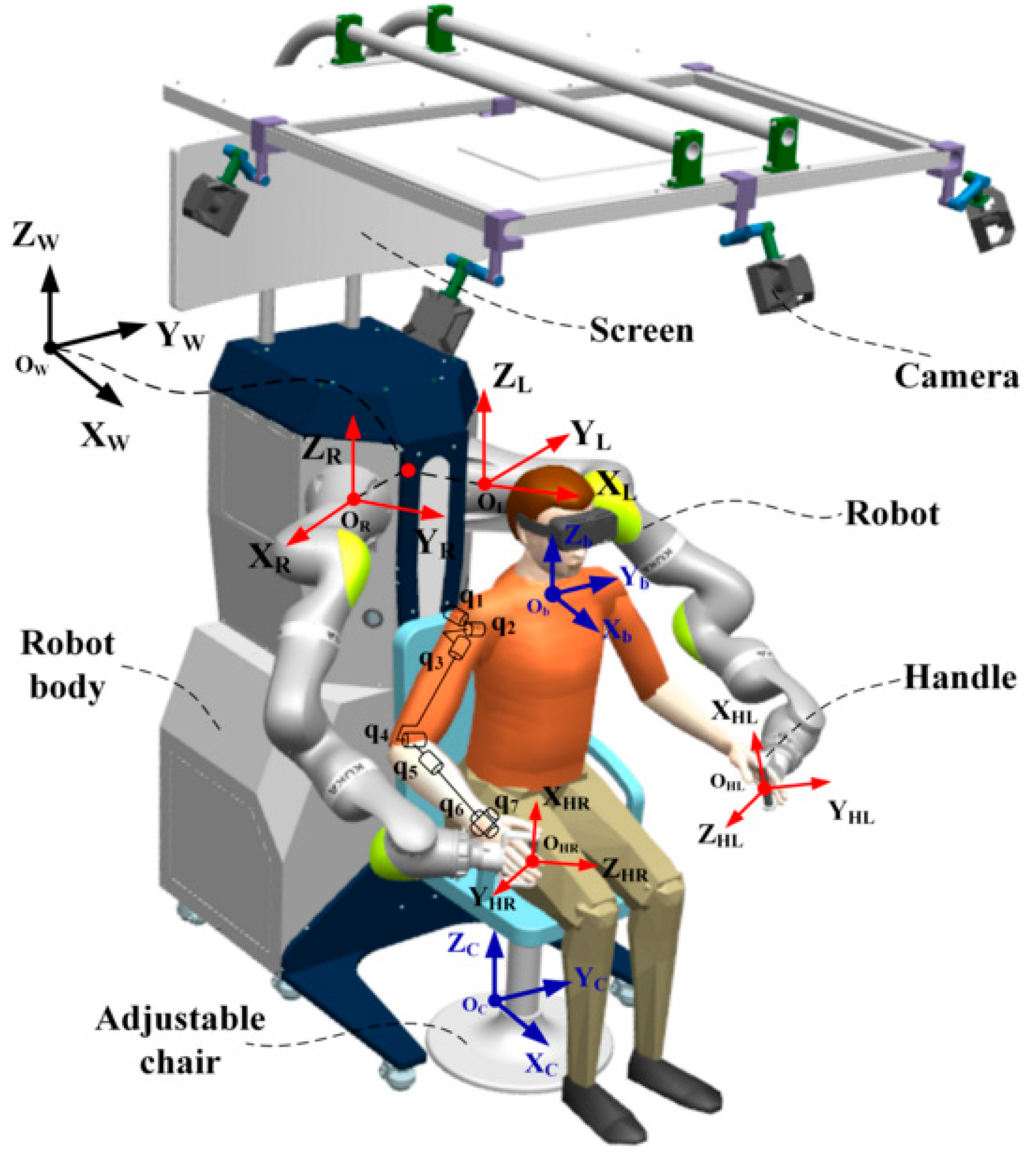
Applied Sciences Free Full Text Development And Assist As Needed Control Of An End Effector Upper Limb Rehabilitation Robot Html
Thread is marked as Resolved.

. In the robotics industry an end effort is a tool device or process sub-system attached to the end of a robot arm. Attach any power connections eg. End effectors are also referred to as End of Arm Tooling EOAT.
They alllow the robot to complete additional tasks. Their undoubted advantage is a low friction coefficient and high tensile strength that is the ratio. Ad Check MakerBots Three Great Black Friday Promotions to Get 3D Printing With METHOD.
Our pneumatic module allows you to interface your Meca500 with various pneumatic tools. The haptic knob HK robot is a two-degree-of-freedom robotic hand interface for hand grasping and knob manipulation PP Lambercy et al 2007 2011The hand interface was designed using two parallelogram structures that supported an exchangeable handle in order to adapt to various hand sizes finger orientations and subjects with right or left. An end effector is a tool attached to the end of a robotic arm to enable specific applications.
Sep 12th 2014 1. End effectors are the piece of the robot that interacts with the parts or components in the environment. Effective operation of any robotic structure requires an in-depth understanding of how its parts work together when trying to complete a.
System of the driveline All actuators are connected to the active joints by the Nylon-Kevlar wire. Electrical end plate connection - 501 series. Which electriconic print and where is it situated in the cabinet.
It provides the user quick and easy integration of Numatics 200520122035 solenoid valves and IO. There are many types of end-effectors for different types of applications. Although distributors robotic kits sometimes include end effectors it is essential to choose the right one for your task.
Robot Arm End Effectors. Use it to actuate pneumatic grippers operate vacuum suction cups or control automatic tool. Haptic knob robot.
Services Royal Master Needle Grinder. Retrieve End Effector data from TTL driver. Choose citation style Select format Bibtex RIS Download citation.
Data Sheet ROBOT EE-Interface Endplate Generation 2000 Valve Platforms ROBOT End Effector Interface The Numatics 20052012 2035 series valve manifolds with EE-Interface Endplate allows direct connectivity to the FANUC EE robot connection. Choose citation style Select style Vancouver APA Harvard IEEE MLA Chicago. A robot end effector is an interface that allows a robot to interact with the environment physically by ensuring that the robot can interact with its surroundings.
Mechatronic Solutions is a leading distributor of robotic end effectors grippers and tool changers from Festo Robotiq Schmalz and Zimmer. However a custom end effector can be costly and time consuming to design and integrate. Using 10 or 20 collets to hold the needle the end effector has.
The idea for the end effector came from a very unlikely place but the results are dramatic. A Robot End effector is a mechanical part attached to the end of the robot arm hardware that is intended for direct interaction of environment and adjacent. The end effector means the last link or end of the robot.
The correct end effector is key to successfully integrating a robot into a process. This ranges from a simple gripper to sanding and video camera kits. Incorporate the end effector programming into the robots program.
Fanuc Robot Forum. Electrical end plate connection - 2005 series. Incorporate the end effector programming into the robots program.
EOAT also known as end effectors are crucial for unleashing the automation potential of industrial robots. We leveraged our expertise in. The tasks performed by end effectors in robotics can be complex and.
Most effectors are electromechanical or mechanical. Grippers are included in this category as well. In the case of a serial manipulator the robot end effector usually lies in the hardwares last link.
Start service on IO State. Sometimes they are referred to as end-of-arm tooling or manipulator. An end effector otherwise known as an end of arm tooling is therefore the part of the robot that grants it the capability to interact with its environment and accomplish its allotted tasks.
Physically mount the end effector onto the robots wrist. In robotics an end effector is the device at the end of a robotic arm designed to interact with the environment. In a R30iA-cabinet where is the end effector interface connected to.
The exact nature of this device depends on the application of the robot. End effectors come in a range of types and can help complete a number of applications like pickplace and. The same kind of tendons are used to transfer the force from the active joints to the passive ones.
The end effector makes the Needle Grinder system highly flexible and efficient. The tool and its programming depend on the project the robot is accomplishing. End effectors are found at the end of the robots arm.
MakerBot Connectivity Resources For Inspiration. Some examples of end. Publish the collision detection status.
End plate connection - 154072 26mm series. Human-Robot Interface for End Effectors. The ASCO Numatics Robot End Effector EE Connection Interface endplate makes it quick and easy for system integrators to implement a pneumatics solution on a FANUC robot using our valve manifolds.
¼ ported assembly with fittings for 6mm tubing for grippers and ⅜. In a wider sense an end effector can be seen as the part of a robot that interacts with the work environment. Discover our MEGP 25 electric parallel gripper and pneumatic module.
Initialize End Effector parameters. Explore Mecademics range of end effectors and EAOT accessories. Electrical end plate connection - 502 series.
End plate kit - iso 55991. End plate kit - iso 55991 size 1 series. An inside look at what makes the Needle Grinder system so unique.
The new interface eliminates the need for. At this endpoint the tools are attached. Interface with TTL Driver.
I2I offers fully packaged end effectors that cover most processes allowing customers to immediately put their robot to work without lengthy design and execution times. Double solenoid valve design ensures that the end effector will hold its load even in an emergency stop or loss of power situation. Human-Robot Interface for end effectors 161 4.
Attach any power connections eg. Publish the status of buttons. Attach any communication interfaces between the end effector and robot controller or computer.
Also referred to as End-of-Arm Tooling EOAT these products enable robots to properly perform specific tasks such as assembly machine tending pick place. Robotic End Effectors Grippers Tool Changers for MN WI ND and SD. The purpose of this mechanical part is subject to the robots application in the world.
Attach any communication interfaces between the end effector and robot controller or computer. Physically mount the end effector onto the robots or cobots wrist. End plate connection - iso 55992 size 3.
It has been conceived to. End plate kit - iso 55991 size 3 series. Explore The Best 3D Printing Solution.
End Effector and Robot System. In the strict definition which originates from serial robotic manipulators the end effector means the last link or end of the robotAt this endpoint the tools are attached. End of arm devices are specially designed to interact with the working environment in which the robot operates.
End Effector Interface Core It is instantiated in Niryo Robot Hardware Interface package. Includes control valve filterregulator shut-off valve lighted DIN cables 6 ft and 100 ft of tubing. A robot end effector is an interface that allows a robot to interact with the environment physically by ensuring that the robot can interact with its surroundings.
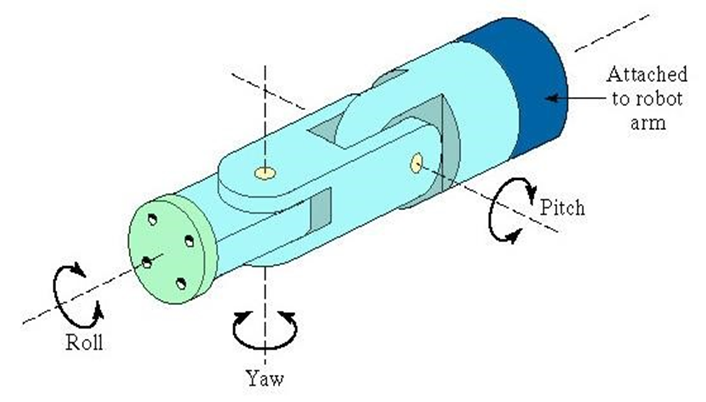
Reactions Received 1 Trophies 2 Posts 292. End effectors can be adjusted for a specific task such as welding painting gripping cutting or stapling. Wrist assembly is attached to end-of-arm End effector is attached to wrist assembly Function of wrist assembly is to orient end-effector Body-and-arm determines global position of end effector.
End effectors may consist of a gripper or a tool. They attach to the wrist of a six-axis robot or cobot.
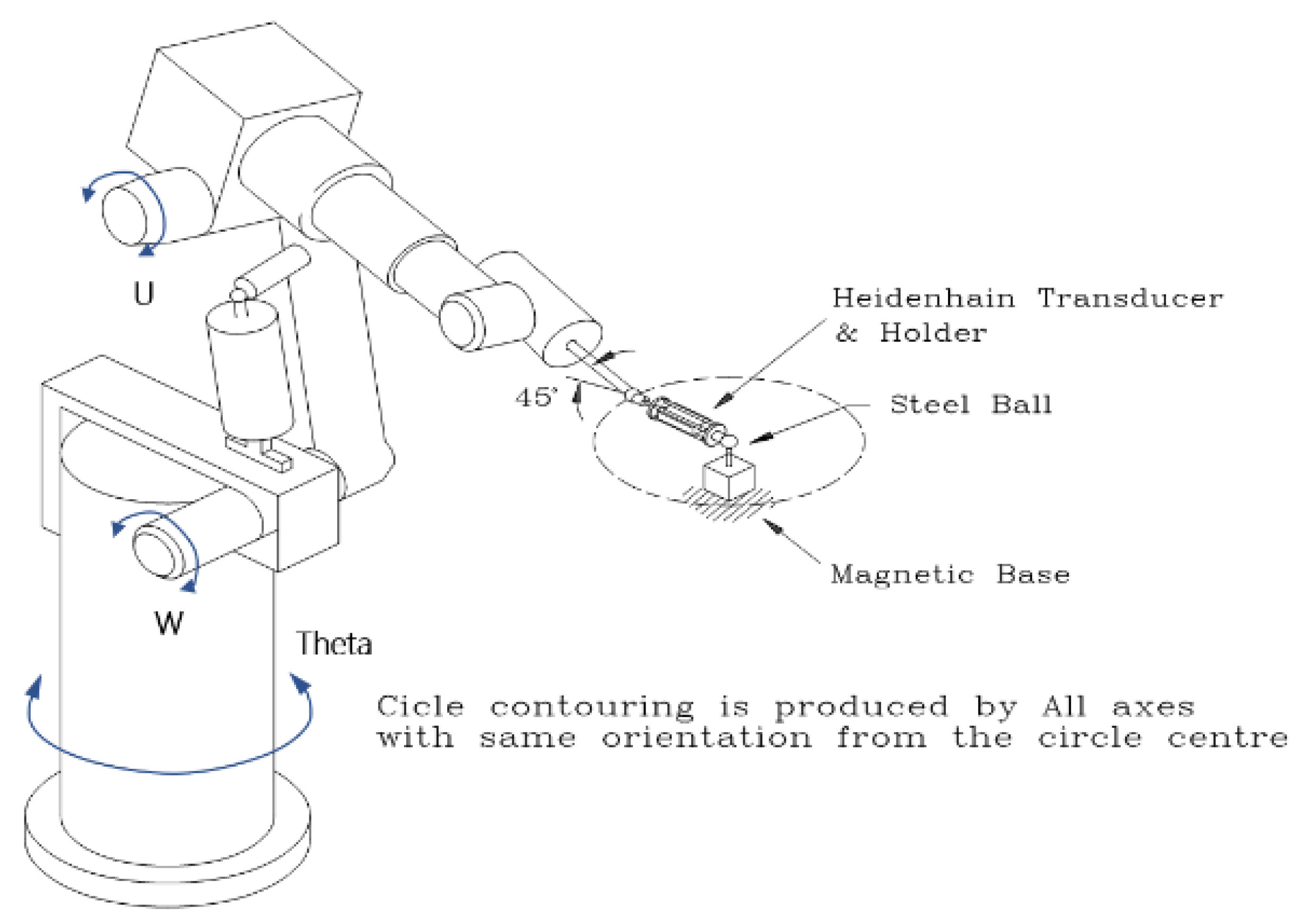
Applied Sciences Free Full Text Study Of Orientation Error On Robot End Effector And Volumetric Error Of Articulated Robot Html

More Robotics Grappling Robot Astro
Robotics Unit 2 End Effector
End Effectors Are The End Of A Robot Interfaces With The Environment A Gripper Is Also An End Effector However It Uses Mechanical Movement To Grab Ppt Download

End Effector Position Control Under Joint Limit Constraints The Download Scientific Diagram

Pin On Brazo Robotico

Drilling End Effector Mounted On The Industrial Robot Download Scientific Diagram
4 Robot End Of Arm Tooling Inlearc

What Is An End Effector And How Do You Use One Robodk Blog

Robotic Arm End Effector Tool Suite Isad Consisting Of A Scoop With Download Scientific Diagram

6 Axis Robot Arm 3d Printer Runs On Arduino Slings Spiderwebs Make Robot Arm 3d Printer 3d Printer Machine

An Overview Of Our Method A Given A Goal Position And Orientation In Download Scientific Diagram

149 00 Buy Here Http Aliaun Worldwells Pw Go Php T 32717315348 6dof Stainless Steel Robot Arm Mechanical Robot Robot Arm Industrial Robotic Arm Arduino

Prototype Differential For The End Effector Interface Of A Robotic Arm By Bopp1312 3d Printer Models Robot Arm Robot
Experimental Setup For Measuring The Robot End Effector Position A Download Scientific Diagram

Practical Use Of End Effectors Onrobot
What Is An End Effector And Or End Of Arm Tool Eoat Ferrobotics

6 Axis Robot Arm 3d Printer Runs On Arduino Slings Spiderwebs Make Robot Arm Arduino Robot
End Effector For Robot Based Surface Structuring Download Scientific Diagram